

Urban Canyons: Why the Last Bastion of GNSS Remains Unconquered
2026-06-28 Click:2
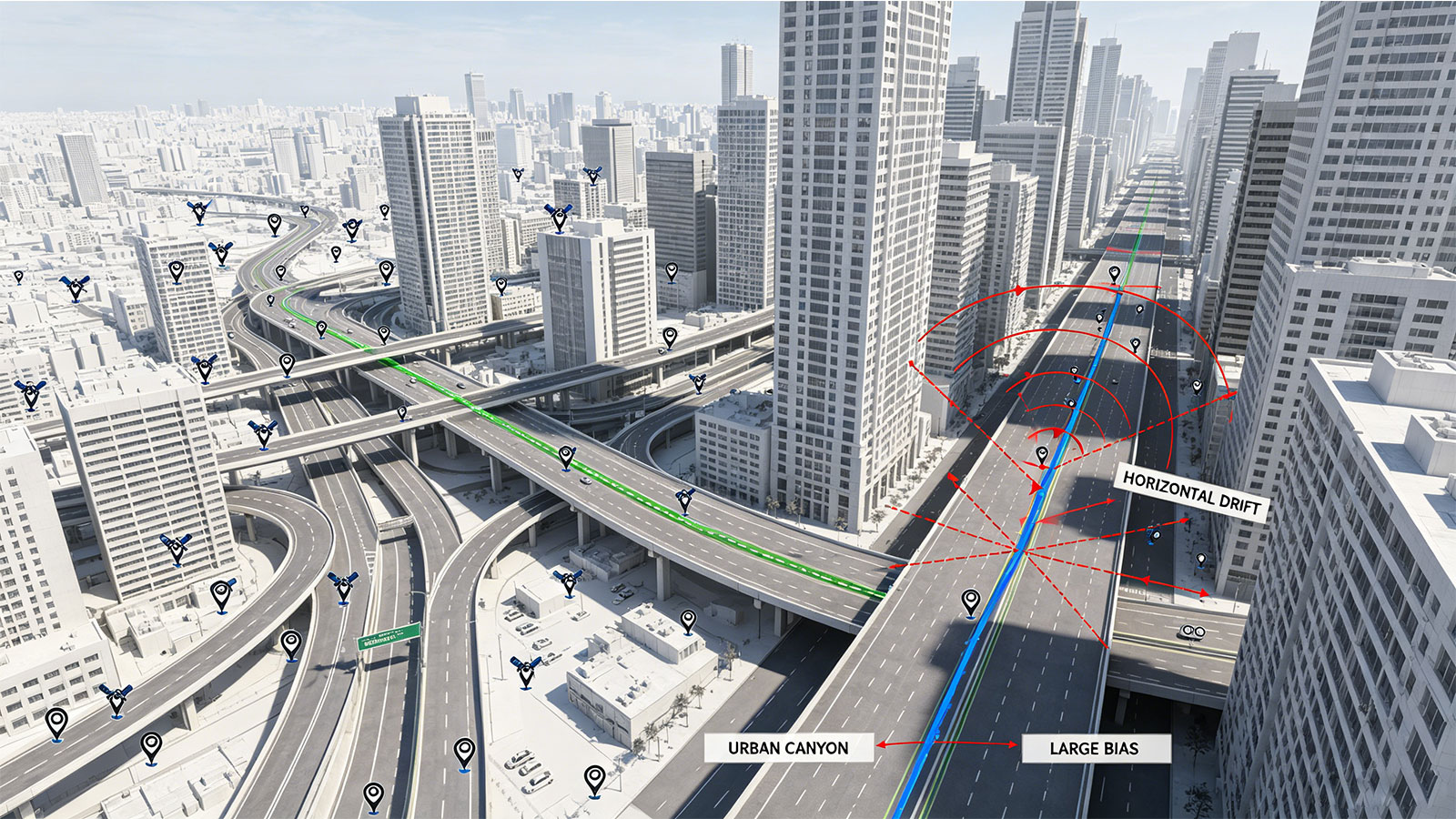
The most troublesome aspect of urban canyons is that GNSS does not fail completely; instead, it continues to output a trajectory that appears reasonably smooth.
Take the high-rise-dense areas of Lujiazui, Shanghai, as an example: on open stretches, the system might track around 18 satellites with an HDOP of approximately 1, producing a trajectory that hugs the center of the lane. Upon entering areas obstructed by both skyscrapers and elevated roadways, the system continues to output PVT data, and the fused trajectory may not necessarily exhibit sudden jumps; however, when compared against ground truth, the lateral error can stabilize at 8–15 meters, exceeding 30 meters at certain intersections.
The real danger lies in the fact that the receiver does not completely lose lock, not all status flags trigger alarms, and the C/N0 readings still show some signals above 30 dB-Hz. At this point, the issue shifts from "is there a signal?" to "is the signal trustworthy?": some seemingly strong signals are actually NLOS (Non-Line-of-Sight) observations resulting from reflections off buildings.
As recently as April 2026, *GPS World* reported that NPL and Vodafone had completed a terrestrial timing trial, using ground-based timing as an alternative to GPS timing. Such news highlights a trend: in environments characterized by urban canyons, indoor settings, interference, or signal obstruction, GNSS can no longer be automatically assumed to be the sole reliable reference for time and positioning.
When a GPS device repeatedly exhibits lane-level jumps on roads flanked by high-rise buildings, the core assessment is that "urban canyons" simultaneously degrade visible satellite counts, satellite geometry, multipath conditions, and Line-of-Sight (LOS) availability (introducing Non-Line-of-Sight, or NLOS, errors). The analysis should proceed by asking: First, how significantly does the number of visible satellites drop when moving from open areas into the canyon? Second, are the residuals consistently higher on the side facing the buildings? Finally, how does the system degrade in terms of HDOP, NLOS impact, and integrity alerts? The next step is to replicate these conditions—combining occlusion, reflection, and low-speed turns—in a laboratory setting before conducting final validation on similar real-world routes.

1. Geometric Degradation in Urban Canyons
When discussing urban canyons from an engineering perspective, it is insufficient to simply describe them as areas with "many buildings" and "narrow roads." A more actionable metric is the ratio of building height to street width—the H/W ratio.
Consider a street 25 meters wide flanked by buildings 30–50 meters tall; the H/W ratio exceeds 1. In this scenario, the receiver no longer views a full hemisphere of the sky but rather a narrow window of sky framed by the gap between buildings.
The consequences are immediate: while 15–20 satellites might be visible in open terrain, that number often drops to 6–10 upon entering a typical urban canyon, with sky visibility potentially reduced to just 20%–40%. Compounding the issue, the remaining satellites are often clustered in a single direction, resulting in extremely poor horizontal geometry.
This manifests in the Dilution of Precision (DOP) values. While an HDOP of approximately 1 is common in open areas, values of 3–5 or higher are not unusual in urban canyons. A pseudorange error of 3 meters—acceptable in open terrain—can be amplified to over ten meters within the canyon.
2. A Four-Fold Challenge
The "urban canyon" scenario presents a combination of four distinct challenges: signal blockage, DOP degradation, multipath effects, and Non-Line-of-Sight (NLOS) reception.
- Blockage: Tall buildings, elevated roadways, and glass facades directly obstruct the direct signal path. In open areas with 18 visible satellites, discarding a few anomalous readings is manageable; however, in a canyon where only 7 satellites remain, discarding even one significantly worsens the geometric configuration.
- DOP Degradation: Satellites tend to cluster along the axis of the road, weakening lateral constraints. Consequently, while vehicle positioning along the road's length may appear accurate, lateral positioning can drift into adjacent lanes or even into the building structures themselves.
- Multipath: Although the direct signal is present, reflected signals also reach the antenna, distorting the correlation peak and introducing errors into the pseudorange measurements.
- NLOS: The direct path is blocked, leaving only reflected paths. If the receiver mistakes a reflected path for the true signal, errors can reach 10, 30, or 50 meters—or even more in complex urban environments.
Therefore, relying on any single algorithm to address just one of these factors is unlikely to fully resolve the problem.
3. The Real Challenge Lies in Mixed LOS/NLOS Conditions
"Worst-case" scenarios—where everything fails—are actually straightforward: the system loses lock and switches to inertial dead reckoning, making the issue obvious. The real difficulty arises from a mix of LOS (Line-of-Sight) and NLOS (Non-Line-of-Sight) signals: some satellites provide clean direct signals, others offer a combination of direct and reflected signals, and some provide only reflected signals.
Traditional quality control relies on metrics such as C/N0, elevation angle, pseudorange residuals, and RAIM. However, in urban canyons, even high-elevation satellites can be affected by reflections from nearby buildings, and strong NLOS signals do not necessarily exhibit low C/N0 values.
Troubleshooting requires analyzing the LOS/NLOS status across at least three layers:
- Signal layer: C/N0, correlation peaks, and Doppler consistency;
- Geometric layer: Alignment of satellite azimuths with the boundaries of street-side building obstructions;
- State layer: Whether observation residuals can be explained by constraints from the IMU, wheel speed sensors, and map data.
The final PVT (Position, Velocity, Time) solution often masks many raw anomalies. To identify the root cause, one must drill down to the level of individual satellites, epochs, and measurements.
4. Closed-Loop Testing: Road Test Discovery and Laboratory Replication
Addressing "urban canyon" scenarios requires more than just simulation or capturing screenshots along a route. A robust approach involves establishing a three-tier closed-loop testing process:
- Real-world road testing: Cover routes featuring narrow streets flanked by tall buildings (where the H/W ratio exceeds 1) and collect raw GNSS, IMU, wheel speed, ground-truth, and RF/IF data.
- Data replay: Feed the same dataset repeatedly into the algorithm to compare different NLOS (Non-Line-of-Sight) rejection strategies, thereby eliminating the variables of route and weather conditions from each test run.
- Controlled scenarios (using GNSS simulators): Isolate variables in the laboratory—such as injecting fixed pseudorange biases into specific satellites, or configuring building heights, street widths, and satellite elevation/azimuth angles—to verify system performance limits under conditions like high HDOP (>4), mixed NLOS, and enhanced multipath effects.

The goal of this closed-loop system is to break down the causes of positioning drift into variables that can be replicated, compared, and validated, rather than attempting a generalized replication of the entire city.
5. Action Cards
| Checklist Items | Front-line Actions | Reference Figures | Common Symptoms | Determining the Caliber |
| Geometric Environment | Estimating the Road H/W Ratio | H/W>1 | Repeated Lateral Offsets Along the Same Road Section | Demonstrate how the sky is sliced into pieces first |
| Sky Visibility | View the sky plot or 3D map | 20%–40% | Many satellites, but concentrated in one direction | Visible sky is more critical than the total number of satellites |
| Satellite number | Comparison between open terrain and canyons | 15–20 → 6–10 satellites | Solution maintained but low redundancy | Based on available observations per epoch |
| DOP | Analysis of HDOP and directional error | HDOP 3–5+ | Usable along the direction of the road; lateral error is significant | Geometric dilution alters the error pattern |
| Multipath | Observe C/N0 fluctuations and residuals | Pronounced near intersections or glass curtain walls | Trajectory jitter and anomalous residuals | Multipath is a dynamic error |
| NLOS | Combines building obstruction and Doppler detection | 10–50 m+ | Signal persists, but the reported position drifts wildly | Strong signals can still be unreliable observations |
| Fusion-Induced Masking | Comparing Raw GNSS vs. Fused Trajectories | Smoothness Does Not Equal Accuracy | Visually Appealing Trajectories with Consistent Lane Bias | Raw Errors Require Separate Attribution |
| GSS | Injection of occlusion and pseudorange bias scenarios | HDOP > 4 | Algorithm failure under boundary conditions | Decomposing urban canyons into controllable variables |
-
Prev:
No More! -
Next:
GPS tracker connectivity: Does it need internet or SIM card? Share:




Return to list